ニュース&イベント NEWS & EVENTS
多くの接触を含む複雑な行動の理解と生成に挑む
~ヒューマノイドロボットとデジタルツインを組み合わせた新たな研究プラットフォームを提案~
研究の要旨とポイント
- 私たち人間は多くの接触を伴う複雑な運動をおこなっていますが、そうした運動をロボットに行わせることは容易ではありません。
- インタラクティブ・ロボティクスをテーマに研究を行っている吉田教授は、多くの接触を含む人型システムの理解と生成という挑戦的な課題の解決を目指し、インタラクティブ・サイバーフィジカルヒューマン(iCPH)と呼ばれるプラットフォームを用いた取り組みについて紹介した総説論文を発表しました。
- 多くの接触を含む複雑な行動をロボットが自動で生成できるようになれば、人間工学に基づいた製品設計や、人間の意図を推定して人間を快適にサポートするロボット、人間と自然かつ安全に共存できるヒューマノイドロボットの開発などに活用できます。
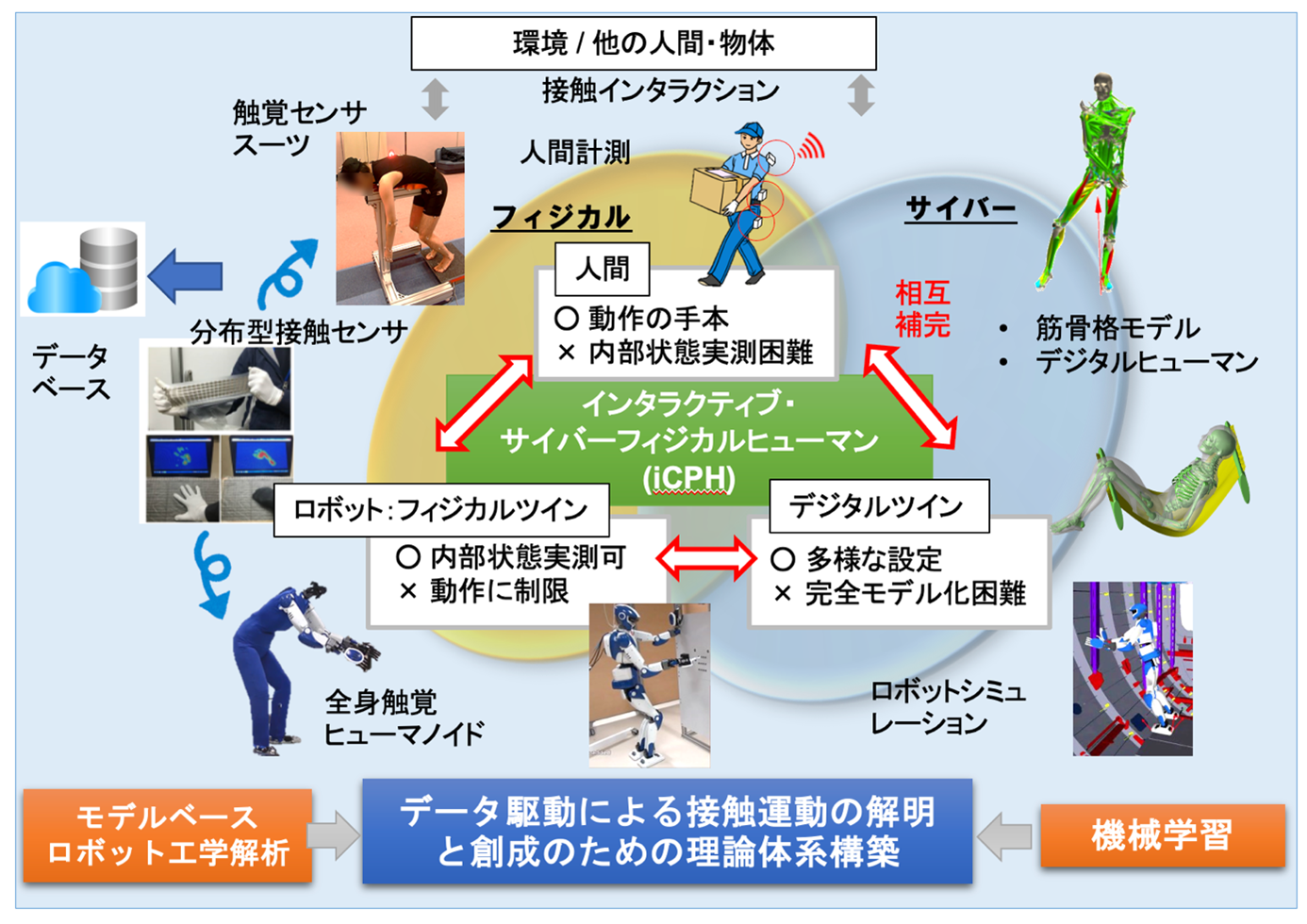
東京理科大学先進工学部電子システム工学科の吉田英一教授は、人間の「フィジカルツイン」としてのヒューマノイドロボットと、サイバー空間上で人間とロボットをシミュレートする「デジタルツイン」を組み合わせたインタラクティブ・サイバーフィジカルヒューマン(iCPH)と呼ばれるプラットフォームを通じて、多くの接触を含む複雑な行動の理解と生成に取り組んでいます。
日常生活の中で、私たちは椅子に座って作業したり、机に手をついて物を取ったり、台車を押したり、複数の「接触」を伴う複雑な運動を自然におこなっています。しかし、こうした運動をロボットに行わせることは容易ではありません。人体および人体を模して作られたヒューマノイドロボット(以下、「人型システム」と総称)は、それ自体が複雑な力学特性を持ち、動きに伴って内部状態はダイナミックに変化します。それに加え、接触する部位や数、順番を考慮すると、ある目的を達成するための接触行動は無数に存在します。この無数の可能性の中から、人間は経験や身体感覚に基づいて最適な接触行動をおこなっていると考えられます。
今回、吉田教授は、多くの接触を含む人型システムの理解と生成という挑戦的な課題の解決を目指し、インタラクティブ・サイバーフィジカルヒューマン(iCPH)と呼ばれるプラットフォームを用いた取り組みについて、総説としてまとめました。iCPHは、センサで内部状態を計測できるヒューマノイドロボットと、さまざまな条件でシミュレーションできる人型システムのデジタルツインを組み合わせることで、相互補完的にデータを拡張・整備し、研究に活用するプラットフォームです(図)。本論文では、人間の計測データから学びつつ、「モデルベース」と呼ばれるロボット工学の力学的解析・最適化手法に、機械学習を融合させた新たな理論体系の構築を目指し、当該分野におけるこれまでの研究を総括しています。
本研究分野が進展することで、将来的には、人間工学に基づいた製品設計や、人間の意図を推定して人間を快適にサポートするロボット、人間と自然かつ安全に共存できるヒューマノイドロボットの開発などに活用できるものと期待しています。
本研究成果は、2022年12月1日に国際学術誌「Frontiers in Robotics and AI」にオンライン掲載されました。
研究の背景
接触を含む複雑な接触を伴う人間の動作については、人間が運動中に何を最適化するのか、人間の動作をどのように予測できるのか、人間とインタラクションする際の最適なロボットの動きはどのようなものかなど、未解明の問題が山積みです。こうした問題の解決を目指し、近年、動きの最適化、筋骨格解析、動的シミュレーションなどのモデルベース技術に基づく人体運動解析が目覚ましく発展しています。
しかし、人間の内部制御信号の計測はまだ難しいのが現状です。そのため、「フィジカルツイン」として実世界での検証用に利用できるヒューマノイドロボットと、機械学習によって人間の動作のデータセットが増加しても対応できる人型システムのデジタルツインを相互補完的に活用することで、複雑な接触を伴う人間の動作に対する理解が深まると期待されます。
研究結果の詳細
吉田教授は本総説で、多くの接触を含む人型システムの理解と生成という課題の解決に向け、人間の計測とモデルベースロボットのアプローチを基盤とし、機械学習のフレームワークを用いて人間の動作の大規模なデータセットを活用することを提案しています。具体的には、①iCPHによるデータ取得を進めることで接触運動の「汎用表現」を導き出し、②破綻しない全身接触運動同士のつながりを表す「接触運動ネットワーク」を継続的に発展させる学習法を明らかにするとともに、③接触運動の「言葉」に相当する「シンボル」を抽出し、その表現によりさまざまな接触運動を作り出す仕組みにつなげることを目標としています。得られた成果を評価することで、人間の運動原理にどこまで迫れるのか、複雑な接触運動がロボットでどこまで自動的に生成できるかについての探求を深めることができます。
吉田教授は、最終的な目標は未経験環境における接触動作の自動理解と生成を可能にする高レベルのシンボルシステムを確立することだと言います。将来的にはデータを公開し、ビルの建設現場など大規模な組立環境でのロボットによる難姿勢での接触作業、工場や介護の現場において、組立作業や患者の移動などの全身接触が多い動作を認識・予測し、作業者の行動を先回りして支援するアシストロボットの開発、仮想空間上でのアバターを通じた遠隔地のオペレータと接触センシングを共有するアバターロボットによる大型機器設置や物体搬送などの人間-ロボット協調タスクの実行など、社会・産業の実問題に展開できると期待されます。吉田教授は「本論文を契機として、ロボティクス、バイオメカニクス、人工知能の研究者による分野横断的な研究が進み、多くの接触を含む人型システムの理解と生成につながると嬉しいです」と述べ、今後の研究の発展に期待を寄せました。
なお、吉田教授は現在、研究プロジェクト「サイバーフィジカルヒューマンによる全身接触運動の包括的データ駆動学習・予測・生成」(科研費基盤S)を主導し、学際的な協力体制のもと、本総説で取り上げたテーマに取り組んでいます。
※ 本研究は、科研費基盤S「サイバーフィジカルヒューマンによる全身接触運動の包括的データ駆動学習・予測・生成」の助成を受けて実施したものです。
論文情報
雑誌名
Frontiers in Robotics and AI
論文タイトル
Towards understanding and synthesis of contact-rich anthropomorphic motions through interactive cyber-physical human
著者
Eiichi Yoshida