ニュース&イベント NEWS & EVENTS
マーカーレスで簡便かつ高精度な歩行分析法を開発
~医療・スポーツなど幅広い分野での運動解析に寄与~
研究の要旨とポイント
- 治療方法の立案や経過観察など、医療・福祉の分野では、簡便で高精度の歩行分析法(※1)が求められてきました。
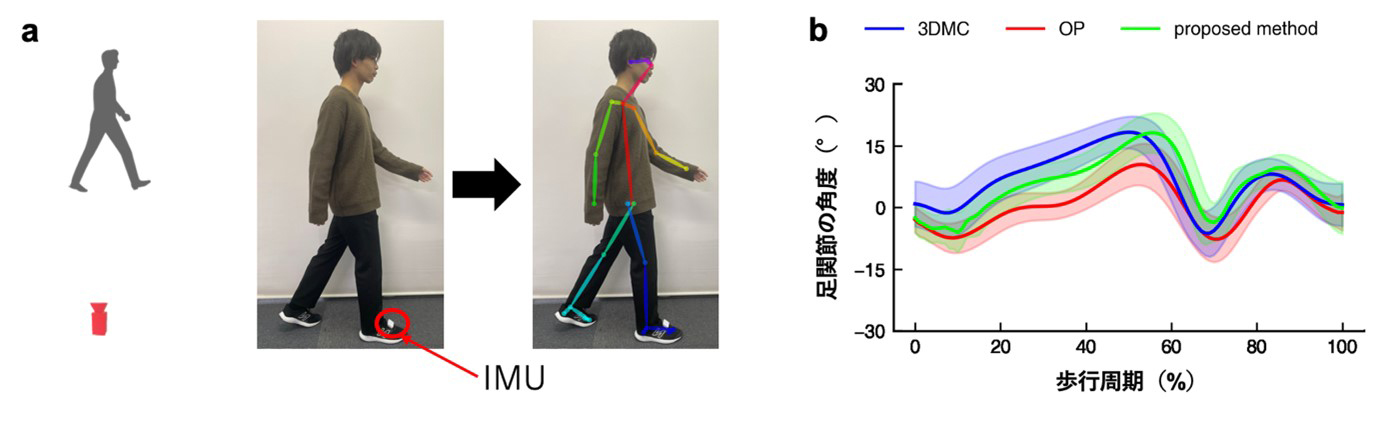
- 本研究では、1台のRGBカメラの映像と1~2個の小型慣性計測ユニットから得られた情報を組み合わせた新たな歩行分析法の開発に成功しました。
- 本手法をさらに発展させることで、容易に高精度な運動解析を行うことができます。
- 治療効果の判定、評価や診断、健康管理などの医療・福祉の現場で役立つだけでなく、スポーツやCGなどの幅広い分野での活用が期待されます。
東京理科大学理工学部機械工学科の山本征孝助教、石毛雄斗氏(2022年度 修士課程2年)、竹村裕教授、県立広島大学保健福祉学部理学療法学科の島谷康司教授の研究グループは、1台のRGBカメラの映像から人体の関節を推定することができる姿勢推定アルゴリズムによる姿勢推定と、足に装着した慣性計測ユニットから取得した情報を融合した新たな歩行分析法の開発に成功しました。本手法を適用することで、従来法の課題であった歩行中の関節角度、特に足関節角度の測定精度を向上できることを実証しました。
医療や福祉などの臨床現場において、歩行分析は治療方針の決定や治療効果の判定に重要な指標となります。しかしながら、大規模な測定機器と広い空間が必要になる、患者の拘束時間が長いなど、多くの課題が残されていました。そこで本研究グループは、これらの課題を改善し、臨床現場で使用しやすく、高精度な歩行分析法の開発と確立を目的として研究に取り組んできました。
今回開発した方法では、デジタルカメラなどにも使用されているRGBカメラ映像からの姿勢推定と足に装着した小型の慣性計測ユニットから取得した情報のみを解析に利用するため、専門的な知識や大規模な装置が必要なく、誰でも簡単に歩行分析を行うことが可能です。また、従来のマーカレスタイプの動作解析装置では誤差の大きかった足関節角度に関して、本手法では精度よく計測できることが実証されました。これにより足関節も含めた歩行中の関節角度や歩幅などの重要な評価指標が簡便かつ精度よく計測することが可能となります。本研究をさらに発展させることで、高精度な運動解析を容易に行うことができるので、医療、スポーツ、ロボット、CGなど幅広い分野への応用が期待されます。
本研究成果は、2022年10月21日に国際学術誌「Scientific Reports」にオンライン掲載されました。
研究の背景
人間の歩行には全身の筋肉や関節が関与するため、解析する際には各部の動きを細かく把握する必要があります。歩行分析では、撮影した映像を利用して歩く速度や歩幅などの各パラメータを取得することができるので、リハビリテーションをはじめとしたさまざまな臨床現場で活用されています。現在、臨床歩行解析の代表的な測定ツールとして、反射マーカーを用いた3次元モーションキャプチャ(3DMC)が使用されています。3DMCは歩行データを正確に測定することができますが、多数のマーカーが必要となるなど手間もかかる、経済的コストが高い、測定には広いスペースと技術的なスキルも必要になるなどの問題があります。慣性計測装置(IMU)を用いたモーションキャプチャシステムも利用されていますが、このシステムでも、多くのIMUセンサーを人体の各関節に取り付ける必要があることから3DMCと同じ問題を抱えており、これらの代替手法が求められています。
そこで現在、人体姿勢推定アルゴリズムを用いたカメラベースのマーカーレスモーションキャプチャシステムが注目されています。しかし、こうしたマーカーレスシステムの場合、サンプリングレートや姿勢推定精度等の問題から、速い関節運動の測定が難しいという問題があります。特に、足関節角度の測定誤差が大きいなどの課題がありました。
こうした問題を踏まえ、本研究グループは、映像から人体の関節点を推定する姿勢推定アルゴリズムOpenPose(OP)による姿勢推定と足に装着した小型の慣性計測ユニットを組み合わせた新たな歩行分析法を立案し、高精度かつ簡単に測定可能な手法の開発および確立を目的とし、研究を行ってきました。
研究結果の詳細
16人の健康な成人男性が4つの異なる条件(①通常速度で足のつま先を進行方向に向けて歩く、②通常速度で足のつま先を進行方向に対して外側に向けて歩く、③低速で足のつま先を進行方向に向けて歩く、④低速で足のつま先を進行方向に対して外側に向けて歩く)でまっすぐ歩く様子を3DMCやRGBカメラで撮影しました。撮影した映像から、歩行速度や歩幅、歩行周期などの歩行全体に関するパラメータに加え、各関節の角度などの各部の状態を定量化し、その妥当性の評価を行いました。
その結果、本手法では多くのパラメータにおいて従来法と同等もしくはそれ以上の高い精度での歩行分析が可能であることが実証されました。また、足関節角度については、いずれの条件においても、従来法よりも誤差を抑制できることを見出しました。一方で、条件②や④などの足のつま先を進行方向に対して外側に向けて歩く場合や過度な回転動作が加わる場合は、測定誤差が大きくなることもわかりました。
本研究では、健康な成人男性を対象としていますが、今後は手法の改善に努めることや、歩行動作に不自由を感じている人や歩行困難な人も対象とし計測も行っていくとのことで、今後の進展が大いに期待されます。
本研究の成果について、研究を主導した山本助教は「本研究は医療・福祉現場での歩行分析ツールとして使用するだけでなく、ヘルスケアとしての歩行機能低下予測、ジムやスポーツ施設でのトレーニング評価、VRシステムで人の動きをアバターに精度よく投影できることなど、あらゆる分野での応用が見込める可能性があります」と話しています。
※ 本研究は日本学術振興会の科研費若手研究(JP19K20748)の助成を受けて実施されました。
用語
※1 歩行分析: 被験者の歩行動作を映像等から記録や観察することで、運動の詳細を解析すること。
論文情報
雑誌名
Scientific Reports
論文タイトル
Verifcation of gait analysis method fusing camera‑based pose estimation and an IMU sensor in various gait conditions
著者
Masataka Yamamoto, Koji Shimatani, Yuto Ishige and Hiroshi Takemura